
S.E. Vos1, M. Maarefvand2, D. Hulskemper1, T. Struijs3, A. de Wulf3, T. van de Voorde3,A. Reniers1, R.C. Lindenbergh1 & J.A.A. Antolinez1
1Delft University of Technology, The Netherlands; 2 University of Padova, Italy; 3 Ghent University, Belgium
* s.e.vos@tudelft.nl
Introduction
Accurate monitoring of vegetation is crucial for coastal resilience, particularly in the face of climate change (Duarte et al.,2013). Airborne lidar and photogrammetry have become essential tools for monitoring vegetated dunes (Suo et al., 2019) and salt marshes (Blunt et al., 2023) thanks to their ability to capture detailed topographic and surface structure data. Over the past decade, advances in sensor affordability and computing power have accelerated the development of monitoring techniques relying on lidar or photogrammetry-derived point clouds.
However, point cloud applications in coastal environments have predominantly focused on terrain and canopy height retrieval, while their potential for deriving quantifying vegetation structural properties (such as canopy density, vegetation volume, biomass proxies, or vertical layering) has received less attention (Shi et al., 2025).
The “Airborne Lidar Vegetation Detection Experiment (ALVDEx)” was conducted in 2025 at both dune and salt marsh sites to explore the possibilities to detect vegetation properties with airborne- derived point clouds. Drones with different lidar and photo instrumentation were flown at varying heights and in different seasons. This abstract presents part of the research conducted in March 2025 on the Sand Engine (SE) near the Hague, the Netherlands.
Objective and Methods
In March 2025, an 125x250 m area was surveyed at the SE using UAV’s equipped with lidar and RGB/multispectral cameras. The site comprises partly vegetated (embryo) dunes in varying development stages with marram grass (Ammophila arenaria) being the dominant species.
Airborne lidar and photogrammetry-derived point clouds were coupled to the collected ground validation data with AI and random forest (RF) models.
Point cloud data were sub-sampled within hexagonal cells (1m diameter) to ensure consistent spatial resolution. A covariance matrix was used to characterize the 3D shape of each local point cloud with a set of geometric descriptors (West et al., 2004). These were related to field-measured vegetation characteristics using RF and feed-forward artificial neural network (ANN) models. Ground truth data, collected from 18 vegetation patches of various sizes spread over the survey area included: indicative plant age, density, species composition, light attenuation, stem length, and biomass.
About 250 local point clouds could be found in the vegetated areas and about 250 local point clouds on sandy surfaces were added to train the model to distinguish between sand and vegetation. This resulted in about 500 groups of point cloud geometric descriptors (derived from the co-variance matrix) and 500 corresponding groups of vegetation data.
Results
The RF and ANN model were trained using an 80-20% train/test split. Figure 1 shows the and RF and ANN model performances for one airborne lidar acquisition. Both RF and ANN models demonstrated strong predictive power with a high R2 (~0.9 ± 0.05) for most vegetation parameters, but a large variation in RMSE values.. The models accurately distinguished sand from vegetation and retrieved most structural vegetation properties, but biomass was predicted less reliably, which is consistent with the fact that lidar‑derived structure does not directly encode material densities and typically requires additional allometric or spectral information for robust biomass estimation. The results nevertheless show a robust and reliable relationship between the LiDAR-derived geometric features and most of the observed vegetation characteristics. The high R² values indicate that the models can accurately forecast vegetation properties from point cloud data. These findings demonstrate the potential of this approach to enhance coastal dune monitoring by directly estimating vegetation properties from LiDAR, thereby reducing reliance on manual interpretation and filtering and enabling more efficient, repeatable data processing. This method is being further refined and validated within the broader ALVDEx experiment.
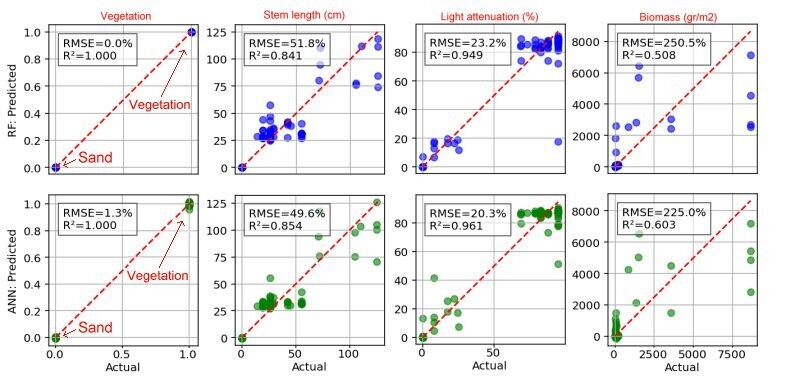
Figure 1: Scatterplots indicating the RF (upper row) and ANN (lower row) model performance for the detection of vegetation (0-1), stem length (cm), ligth attenuation (cm) and biomass (gr/m2).
References
Blount, T., Silvestri, S., Marani, M., & D’Alpaos, A. (2023). LiDAR derived salt marsh topography and biomass: Defining accuracy and spatial patterns of uncertainty. *ISPRS Archives*.
Duarte, C. M., Losada, I. J., Hendriks, I. E., Mazarrasa, I., & Marbà, N. (2013). The role of coastal plant communities for climate change mitigation and adaptation. *Nature Climate Change, 3*, 961–968. [https://doi.org/10.1038/nclimate1970](https://doi.org/10.1038/nclimate1970].
Suo, C., McGovern, E., & Gilmer, A. (2019). Coastal dune vegetation mapping using a multispectral sensor mounted on an UAS. *Remote Sensing, 11*(15), 1814. [https://doi.org/10.3390/rs11151814](https://doi.org/10.3390/rs11151814].
Wang, Y., J., & Kissling, W. D. (2025). Multi-temporal high-resolution data products of ecosystem structure derived from country-wide airborne laser scanning surveys of the Netherlands. *Earth System Science Data, 17*, 3641–3677. [https://doi.org/10.5194/essd-17-3641-2025](https://doi.org/10.5194/essd-17-3641-2025].
West, K., Webb, B., Lersch, J., Pothier, S., Triscari, J., & Iverson, E. (2004). Context-driven automated target detection in 3D data. *Proceedings of SPIE – The International Society for Optical Engineering, 5426*. [https://doi.org/10.1117/12.542536](https://doi.org/10.1117/12.542536].
