S.D. Kamminga1, C.W. Williams1, S. Nylund2, H. Huitema 1
1 Nortek B.V.,
2 Nortek AS,
Introduction
Measurements of currents need good bathymetric data. Especially in dynamic environments the bed depth at the position of the ADCP and at the time of the measurements is of importance for further use of the data of measured currents directly and for estimating the discharge in a river or tidal channel.
The local depth could be obtained from bathymetric measurements with echo sounders. That is however not done at the same time. A separate echo sounder could be installed at the same vessel but that carries the risk of acoustic interference. Current ADCPs for coastal and oceanic measurements measure with four slanted beams each having an offset compared to the position of the instrument and are not optimally configured for detecting the bed due the angle of the beam with the bed and lack of dynamic range.
A different problem is that for sediment measurements the cells or bins are large and data close to the bed is lacking.
The goal is to design an ADCP that measures bed depth directly below the instrument, has sufficient dynamic range and can be used for sediment measurements.
Methods
We propose a 1 MHz ADCP with an extra acoustic beam that is directed vertically downwards. This extra beam measures depth directly below the ADCP. The acoustic pulse is short compared to the acoustic pulse that is being used for current measurements and bottom tracking. The short pulse results in a sharp return from the bed and a precise and accurate depth estimate. The acoustic transducer has a wide bandwidth, allowing for sophisticated processing techniques.
The ADCP can, using the same vertical beam, produce high resolution scientific echograms from 10 cm below the ADCP to the bed.
Results and conclusions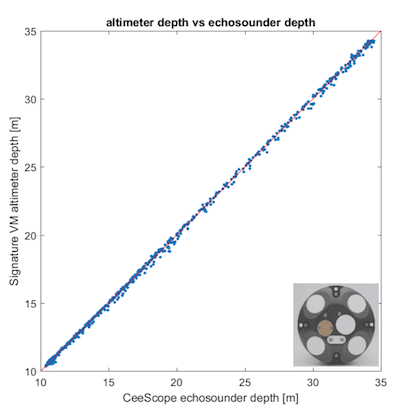
Depth measurements using this ADCP have been carried out in the Marsdiep in The Netherlands. The results have been evaluated against an echo sounder that was mounted on the same vessel. The echo sounder was positioned as far away as possible to limit interference.
The accuracy of the measured depth is better than 1% of the depth.
We conclude that the method works well. Further validation in different circumstances will be performed. The method will be implemented in ADCPs with different frequencies.
I. Surname1*, F.N. Another-Surname2 , Y. Next-Surname2
1 University Name, Country; 2 Organization Name, Country
* Corresponding author: mail.name@organization.org
